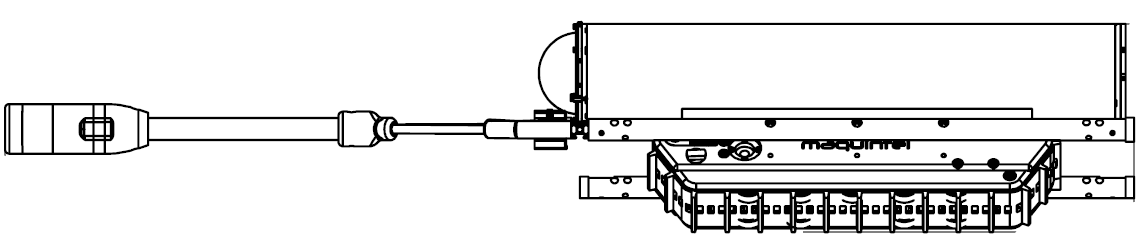
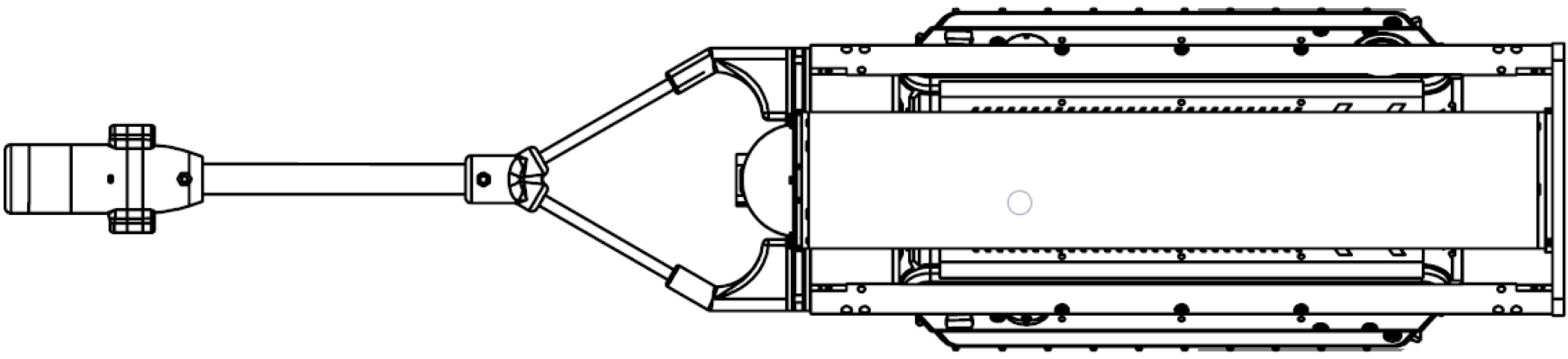
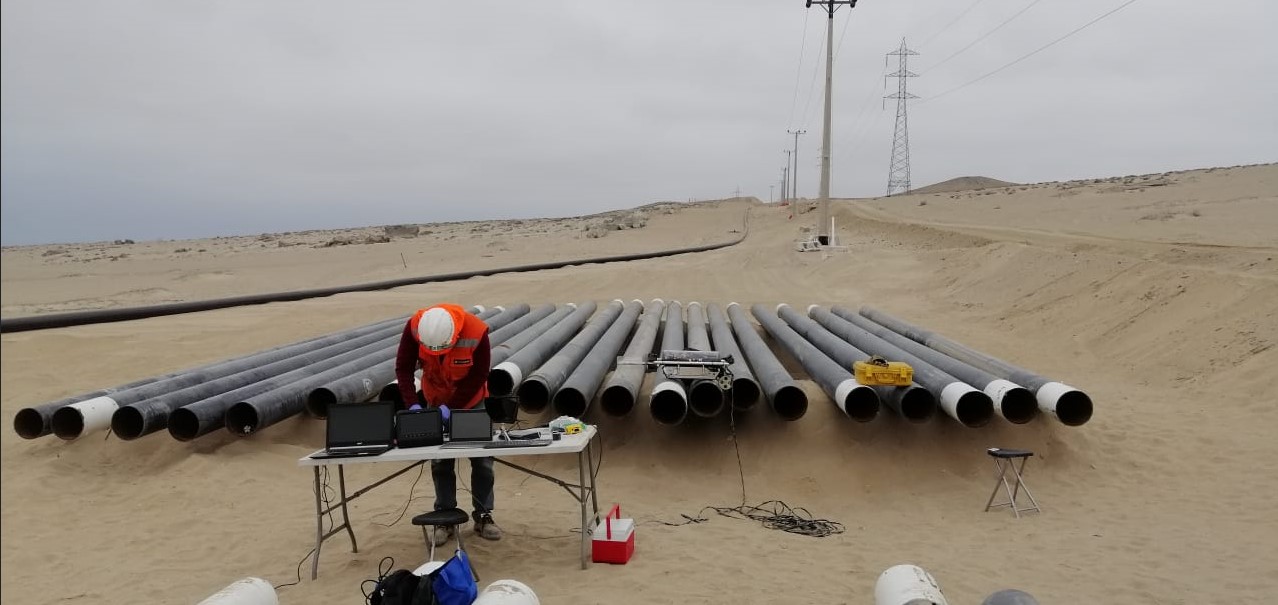
One of the robots Caterpillar version created to describe the wear and corrosion in metallic pipes using the Software of Wear in Pipes.
ORG DP7 is a pipe inspection robot based on a configuration of crawling caterpillars attached side by side to the series ORG V7.
The robot has a differential configuration allowing it to maneuver within the pipes and is greatly protected so it is able to operate underwater.
DP7 is capable of submitting a series of specific data obtained from the 3D Scanner sensors, Profilometry and HD Video.